2023年2月14日,美国摄影测量与遥感学会(ASPRS)公布了年度获奖论文,我院胡庆武教授指导博士生段旭哲、团队成员赵鹏程老师、王少华老师撰写的论文“A Low-Cost and Portable Indoor 3D Mapping Approach Using Biaxial Line Laser Scanners and a One-Dimension Laser Range Finder Integrated with Microelectromechanical Systems”获得约翰·戴维森主席应用论文一等奖(The First-place of the 2023 John I. Davidson President’s Award),奖金1000美金。近年来,ASPRS年会每年均设优秀论文奖项5项,从每年刊登在ASPRS官方刊物Photogrammetric Engineering & Remote Sensing (PE&RS)上的所有论文中匿名评审产生。其中,约翰·戴维森主席应用论文奖每年仅评选出三篇,分别为一、二、三等奖,用于表彰在ASPRS官方期刊上发表的具有实用价值的研究。
高精度的室内三维点云可以为室内场景建模、语义理解以及机器人自主定位导航等提供有力的数据支撑,但现有的室内三维测图设备仍存在体积大、便携性差以及成本高等不足。论文提出了一种低成本、便携式的室内3D建图方法,该方法将消费级的双轴线激光扫描传感器、单轴点激光测高传感器与MEMS惯性测量单元一体化同步集成,设计了一种可靠的多传感器标定方法,以确定传感器之间的空间关系。由水平激光扫描仪获得的2D点云和由MEMS惯性测量单元获得的定向信息通过改进的同时定位和建图算法估计出集成系统的2D位姿。然后融合2D位姿和单轴点激光测高传感器获取的高度信息,获得集成系统的3D位姿。最后,结合多传感器的空间标定结果和集成系统的3D位姿,恢复出倾斜激光扫描仪生成的2D点云的实际位置和方向,以重建室内环境的3D点云。
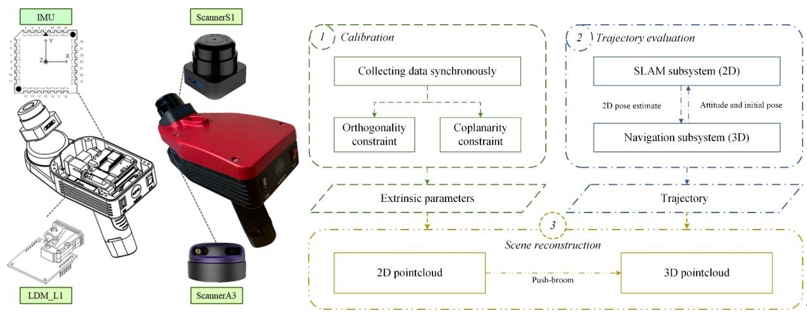
图1便携式室内三维测图方法
研究团队同时设计并研发了低成本、便携式的室内3D测图装置,该装置重量不足1kg,一个人轻松手持便可在行走过程中采集室内三维激光点云,实现室内场景三维测图和实景建模,测图精度可以达到3cm,而成本只需要1万元人民币左右,不足国内外同类型设备价格的1/20,在博物馆、大型商场、地下空间、交通综合体等室内空间数字孪生实景建模中有广泛的推广应用前景。

图2三维测图结果
美国摄影测量与遥感学会(ASPRS)创立于1934年,致力于推广摄影测量和遥感技术,促进研究和开发,提供教育和认证机会,是摄影测量与遥感领域最知名的国际学术组织之一。胡庆武教授团队的研究成果曾多次荣获ASPRS最佳研究论文一等奖,其中包括2018年ASPRS年度学术论文金奖(Grand Award)——塔尔伯特·艾布拉姆斯奖(TALBERT ABRAMS AWARD),奖金3000美金,这一奖项是该学会在摄影测量方面的年度最高荣誉。



















